


- Materialized test system evaluation for waist injury via bio ceramic and robot assisted rehabilitation
Shicheng Chen*
Henan Institute of Economics and Trade, Henan Zhengzhou 450000
This article is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Sports injuries have become an unavoidable problem in sports due to the rapid development of the sport. In the realm of sports and medicine, repairing sports injuries has long been a priority. The widespread use of biomedical materials promotes medical technology innovation and progress. Here in this work, a list of bio-ceramic materials and role of Pepper robot in healing sports injuries is investigated. A Pepper robot is employed to build a rehabilitation robot system integrating cognitive and motor rehabilitation training. It is proved that the process of human pose estimation by Pepper robot is mainly due to the operation speed of Pepper machine reaching 2 frames per second. The position information of the final joint can provide a feasible basis for the stability judgment of human pose. A short review on biocompatibility of available ceramic materials along with robot assisted in sports injuries rehabilitation is presented in this research
Keywords: Bio-ceramics, Sports injuries, Rehabilitation training
Bio-ceramics are materials that are compatible with human living tissue, usually glassy or ceramic materials are used to repair or replace human body parts that have been injured. These can be made in a range of forms (for example, powdery, coating, and bulk form) to perform various activities in human tissue repair and replacement. Ceramics, glasses, glass-ceramics, and com- posites are among them. Many bio-ceramic materials with good physical and mechanical qualities as well as biocompatibility can be created through molecular design.Exercise is an activity that involves physical strength and skills and is restricted by a set of rules or habits. For human beings, it is the basic form of activity to maintain the orderly operation and flexibility of the effective body [1]. Among them, the main purpose of sports has two, one is to exercise, enhance physical fitness, improve health; The other is the educational function. Physical education is the main means of education, cultivating people's health awareness, the spirit of hard struggle, and forming the concept of lifelong physical education [2]. Nowadays, sports are also considered a healthy culture and an important guarantee of social progress. Therefore, it has gradually become the focus of scientific research workers to constantly improve the development of sports, introduce high-tech achievements such as sports auxiliary robots, and promote its development to higher, faster and stronger direction [3-5]. Intelligent rehabilitation robot includes upper limb rehabilitation robot, lower limb rehabilitation robot, intelligent wheelchair and interactive health training robot. These robots are different not only in appearance, but also in function. For example, the upper limb robot mainly provides active or passive rehabilitation training for patients in the process of upper limb rehabilitation; Intelligent wheelchair mainly for the seriously ill, disabled and elderly people to provide alternative walking, steering, physical health examination, emergency call and other functions; Interactive health training robots can not only provide human-computer interaction and functional customized rehabilitation training for the elderly and severe patients, but also have certain entertainment and movement functions [6-9]. How to help athletes or the general population to improve their sports ability or even repair their damaged motor functions through robot-assisted sports training, establish efficient sports training methods, improve the level of training characteristics and brain-body matching efficiency, and establish an objective training evaluation and prediction system are both hot and difficult points in the field of sports training [10, 11]. The treatment of sports injuries has long been a priority in the sporting world. Scillia et al. presented a surgical procedure for patients with sports muscle injuries that were not treatable with conservative methods and this included rectus abdominis repair and adductor muscle lengthening [12]. Due to their unique features, composite biomaterials have piqued the interest of researchers from all over the world. Wang et al. looked at how nano-hydroxyapatite and its composite biomaterials can be used to treat bone defects. They debated whether the use of composite materials and polymer biomaterials could help overcome nano-brittleness hydroxyapatite's and poor mechanical characteristics [13].
Technical faults or abnormalities during the activity are the leading cause of sports injuries. Even professional athletes, let alone average people, make blunders in their moves. Their workout time is limited, and they are unable to perform some tough maneuvers. These incorrect actions are in violation of the human body's physiological traits and biomechanical principles and can easily result in sports injuries [14]. Therefore, considering the importance of this field, a short review on biocompatibility of available ceramic materials and the significance of pepper robot assistance in sports injuries rehabilitation is presented in this research.
An important part of the field of motor rehabilitation is nerve repair. Clinical studies have shown that the autonomic repair system functions at the beginning of nervous system damage (including surgery, trauma, disease, etc.). When classifying rehabilitation training types, we need to judge patients' muscle strength level, which is divided into six levels [15-18].
1. Limb paralysis, complete muscle paralysis, muscle contraction, no activity
2. Muscles contract slightly, but do not move the joint
3. Muscles have a certain capacity to contract, can drive the joint movement, but only in the horizontal plane, unable to overcome gravity to move
4. Muscles have a certain capacity to contract, which can drive joint movement and overcome gravity to move
5. Muscle strength is slightly weaker than normal people, and can resist certain resistance to exercise
6. Muscle strength was completely normal
By analyzing different muscle performance at different levels of muscle strength, we divided rehabilitation training into four stages:
(1) Passive movement: refers to the patient's move- ment is completed by external force, the patient's muscles cannot contract, can only rely on the rehabilitation therapist or rehabilitation robot to complete the action. When doing passive movements, attention should be paid to complete within the range of motion of the joint, but try to complete the full range of rehabilitation action.
(2) Assisted movement: refers to the patient's move- ment through partial external forces to complete. Inability to complete movements or movements autonomously due to lack of muscle strength. Complete movement or movement with the help and guidance of rehabilitation training or rehabilitation equipment.
(3) Active movement: refers to the patient's willingness to complete movements or movements without external assistance or additional external resistance.
(4) Impedance movement: refers to the patient's limb movement, subjected to a certain amount of external resistance, until the completion of the complete move- ment. Impedance movement can restore and develop muscle structure and function and is widely used in the late stage of exercise rehabilitation, but also used in a lot of training, to improve human performance.
So in the stage of our rehabilitation, four types of rehabilitation exercise are essential. In the initial stage of rehabilitation can just begin to recover, the main passive movement and assisted movement; Basic recovery, mainly active movement; In the later stage of rehabilitation, in the middle of rehabilitation, muscle function muscle function is fully restored to impedance movement. Therefore, in the design of shoulder rehabili- tation robot, these four movements are reflected [19].
Structure of rehabilitation robot
At present, the design of rehabilitation robot is mainly divided into terminal type and traction type according to different traction and protection modes.
In the beginning, scientists designed rehabilitation robots using the terminal type. The principle of the rehabilitation method of the terminal type rehabilitation robot is that the end of the robot is in contact with a part of the patient's limb (usually the end of the limb). Driven by the robot, the contact part is provided with power to control the patient's movement for rehabilita- tion. The terminal rehabilitation robot is mainly controlled by inverse kinematics calculation [20]. The terminal rehabilitation robot is characterized by simple mechanical structure, easy manufacture and installation, low cost, small size and strong applicability. However, the terminal rehabilitation robot has obvious defects. The terminal rehabilitation robot cannot complete the rehabilitation training of each individual joint of the patient. Exoskeleton rehabilitation robot is designed by analyzing the ergonomic principles of human body and by mechanical structure design to reproduce the limbs that need to be rehabili- tated. Each moving joint of the limb matches the joint of the rehabilitation robot and coincides with the center of rotation.
The shoulder joint rehabilitation robot mainly adopts aluminum alloy material, whose density is P =2710 kg/m3, and carbon fiber material, whose density is P = 1800 kg/m3. In order to simplify the calculation model, the indirectly driven motor and reducer are simplified as massless particles concentrated at the rotation center of each joint, and the end half ring is simplified as a rod. In order to make the motor can provide enough torque and power, in the motor load estimation, it is necessary to move each joint of the shoulder joint rehabilitation robot to the maximum load, calculate the maximum motor load, and ensure that the motor meets the use requirements. The quality of all parts of the shoulder joint rehabilitation robot can be calculated by UG software. The key structural parameters of the shoulder joint rehabilitation robot were measured and calculated by UG software, as shown in Table 1.
When the shoulder joint robot performs rehabilitation training, it is necessary to consider the mass of each moving joint on the human upper limb and the moment of inertia during movement, and finally estimate the rotation speed and power of the rehabilitation robot under the maximum working condition by combining the torque calculation of the driving unit spindle of each joint under no load [21].

Patient screening and determination
Ten patients were recruited in the hospital, including 5 males and 5 females, with an average age of 61.7 years. They were all patients with cognitive impairment diagnosed by professional doctors. Inclusion criteria were as follows: (1) middle-aged and elderly people with cognitive impairment diagnosed by professional doctors, accompanied by a decline in speech ability; (2) Under the age of 80; (3) Defective motor ability, slow walking and risk of instability; (4) Still have the ability to walk exercise, can carry on normal verbal communication. (5) They are able-bodied, do not wear artificial limbs, can carry out autonomous activities, and can use auxiliary devices (such as crutches) when appropriate; (6) The lower limbs have not undergone major surgery (such as knee replacement, amputation); (7) No history of neuro- logical diseases, no use of neurological drugs; (8) All recruited patients can independently understand the process of the experiment and make self-judgment on the experiment. They can participate in the experiment on the basis of confirming the feasibility of the experi- ment. Meanwhile, they need to obtain the consent of their families and sign the informed consent.
Experimental environment and experimental setting
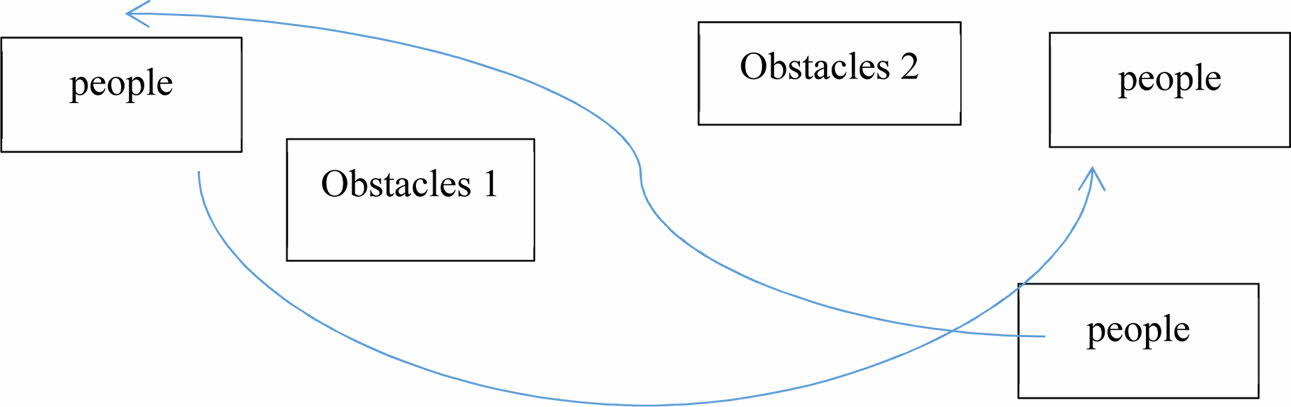
The experimental environment and schematic diagram are shown in Fig. 1 below. The site is the rehabilitation Department of neurology department of Shenzhen Second People's Hospital. The site size is 2.4 m × 8 m, and there are two obstacles in the middle, about 3.5 m apart.
Before the experiment, Pepper robot scanned and posi- tioned the site and drew a map of the scene. Then the experiment was carried out according to the following steps:
(1) Pepper actively initiates language communication with patients; (2) Patients give Commands such as face recognition, posing and dancing to Pepper through voice or touch, and the robot responds accordingly according to the commands;
(3) Pepper can wake up and remind patients to take medicine, exercise and other preset activities within a set time, and this function lasts for the whole experi- ment;
(4) After reaching the set time of exercise reminder, Pepper reminds the patient to do rehabilitation exercise, and the patient will walk along the route shown in Fig. 1;
(5) Pepper can track the human body in real time, accurately avoid obstacles, and capture video of the action process.
(6) Pepper collects real-time video image data from a TWO-DIMENSIONAL camera and sends it to the com- puter, where the trained model on GPU is used to predict the key points of the human body in the video images, estimate the position of the main joints of the human body in real time, and evaluate the motion state. After the experiment, Pepper returned to the autonomous living mode, and could be awakened at any time by the patient to carry out the corresponding instructions.
Experimental analysis
The human body tracking based on the dynamic camera is very complicated. How to detect and track the target quickly is the focus of this research. Pepper has two two-dimensional cameras, which can provide 640 × 480 resolution image data at 30 frames per second. As shown in Fig. 2, the field of view of Pepper camera is limited and targets are easy to be lost. To solve this problem, face detection on the front and red ball detection and tracking on the back are adopted. Make sure the body has a target in Pepper's field of vision from different angles. The principle of human tracking algorithm is as follows: (1) target initialization, moving target detection; (2) Feature extraction and target detection; (3) Judge the target model, here only used the face and red ball model; (4) Target search and recognition, in each frame of the image to obtain the target candidate sample, this step affects the tracking efficiency; (5) Model update. This step can be used to judge whether the robot is facing the front or the back of the human; (6) The robot tracks the movement. After the target is determined, the robot calculates the position and distance so as to track the human body within a safe and reasonable range.
In the process of human tracking, video image infor- mation is collected by Pepper camera and predicted by deep learning network. In target detection, the ratio of intersection and union between the detected rectangular region and the manually marked rectangular region is usually called intersection and union ratio (IoU), where IoU is 0.5. When the IoU between the detected region and the true value is greater than 0.5, the output result of the model is considered to be correct. When the model outputs multiple results, the result with the largest confidence is taken. Based on the comparison between IoU's model output at 0.5 and manual annotation area, the accuracy of each joint node in the whole process (including undetected joint nodes) was calculated.
As shown in Table 2, among the 200 frames of test data collected from 10 people, the test accuracy of the head was the highest 91%, and the accuracy of the wrist was the lowest 59.5%. The overall accuracy was affected by the external clothing covering. In addition, the process of human pose estimation by Pepper robot is mainly affected by the data transmission speed between Pepper robot and the computer. The whole process takes longer than that of direct human pose estimation, and the operating speed can reach 2 frames per second. Finally, the position information of the joints can provide a feasible basis for the stability judgment of human posture.
After repeated comparison, the reasons for the low identification accuracy of limb parts are summarized as follows:
1) The video image quality collected by Pepper robot is not high, and the light in the experimental environ- ment (hospital) is too strong on one side and too weak on the other, which is affected by the light when the robot turns around;
2) The experimenters wore loose clothing, some of which were still wearing skirts, which was not condu- cive to the identification of nodes;
3) In addition to the tracking target, there are other target groups, and sometimes the human body occludes each other;
4) Targets such as elbows and wrists are small and difficult to identify. Next, improvement will be made to the above existing problems
One step to improve the identification accuracy for further research.
Basic requirements of bio-ceramics for injury
The composite biomaterial must meet the following conditions in order to be implanted into the human body as a certified implant. First and foremost, it must be biocompatible. The core idea is that benign effects are desirable. The chemical structure of the material must be stable, and the raw material must be pure to have a harmless effect. It will neither irritate or harm tissues, nor will it create immune interference or rejec- tion, nor will it cause hemolysis or coagulation [22]. The ability of a material to demonstrate a good pro- liferation response phenomenon is an important marker of biological stability [16]. After a period of time, the substance will form a changed structural state after being transferred into the living body and coming into contact with the receiving tissue. The optimal material will have a proliferative reaction on the surface, resulting in a fibrocyte-dominated cell layer [23].
|
Fig. 1 Schematic diagram of experiment scene. |

Against brain damage and cognitive decline in patients with cognitive movement coordinated rehabilitation training, clinical and medical service robots that occupy the home demand big and single function of the reality, the main development of Pepper robot medical service functions, to be designed for a brain injury, cognitivemovement disorder patients care, cognitive movement coordinated rehabilitation robot. Biomaterials have increasingly become more common in the treatment of sports injuries, but their use must take into account the material's compatibility with the specific injury site. At present, the deficiency of this study lies in the lack of targeted and authentic corpus. It is worth thinking about how to gradually exercise the language ability of patients with cognitive impairment. Secondly, the trans- mission speed of video and other large data between Pepper robot and computer is slow, resulting in the running speed of the whole attitude estimation process can only reach 2 fps/s. In the next step, we will continue to study the real-time tracking and acquisition of video image data by the robot, real-time judgment of human stability and other issues, and expand the function and applicability of the cognitive-motor rehabilitation robot.
- 1. M. Hosseini, R. Meattini, G. Palli, and C. Melchiorris, J Robot Res. 11 (2017) 3036468.
-

- 2. Q. Lang, C. Zhong, Z. Liang, Y. Zhang, and Y. Tian, Artif. Intell. Rev. Suppl 1 (2021) 1-40.
- 3. H. Li, Microprocess Microsy 81 (2021) 103673.
-
- 4. J. Liu, L. Wan, Ferroelectrics 579[1] (2021) 133-147.
-
- 5. I. Duran, K. Martakis, C. Stark, L. Schafmeyer, M. Rehberg, and E. Schoenau, J. Pediatr. Endocr. Met. 33[8] (2020) 1083-1092.
-
- 6. X. Li, and T. Wu, IEEE Access PP[99] (2020) 1.
- 7. Q. Meng, Z. Jiao, H. Yu, and W. Zhang, Mech. Sci. 12[1] (2021) 639-648.
-
- 8. M. Lyu, W.H. Chen, X. Ding, and J. Wang, Rev. Sci. Instrum. 90[9] (2020) 094101.
-
- 9. B. Satheesh, Turcomat 12[5] (2021) 1551-1558.
-
- 10. H.D. Lin, T. Zhang, Q. Chen, H.W. Li, and I.D.Q. Ba, Acta Automatica Sinica 42[12] (2016) 1832-1838.
- 11. X. Huang, F. Weng, Z. Wei, and M.M. Kamruzzaman, J. Intell. Fuzzy Syst. 6 (2021) 1-8.
-
- 12. A.J. Scillia, T.P. Pierce, E. Simone, R.C. Novak, and B.A. Emblom, Arthrosc. Tech. 6[4] (2017) e1281- e1284.
-
- 13. C. Wang, Y. Wang, H. Meng, X. Wang, Y. Zhu, K. Yu, X. Yuan, A. Wang, Q. Guo, J. Peng, and S. Lu, Int. J. Polym. Mater. 65[12] (2016) 601-610.
-
- 14. M. Xing, Adv. Mater. Sci. Eng. 3 (2021) 4954325.
-
- 15. I. Akgün, E.E. Avc, E. Timurta, Demirbüken, and M.G. Polat, Gait Posture 81[4] (2020) 8.
-
- 16. F. Ozkul, Y. Palaska, E. Masazade, and D. Erol-Barkana, Signal Process. 13[3] (2019) 378-386.
-
- 17. M. Ebrahim, M. Mashat, C.T. Lin, and D. Zhang, IEEE Tneur. Sys. Reh. 27[10] (2019) 2178-2185.
-
- 18. R.S. Calabrò, S. Filoni, L. Billeri, T. Balletta, and A. Naro, Ann. Biomed. Eng. 49[9] (2020) 122-130.
- 19. M.W. Rivolta, M. Aktaruzzaman, G. Rizzo, C.L. Lafortuna, M. Ferrarin, G. Bovi, D.R. Bonardi, A. Caspani, and R. Sassi, Artif. Intell. Med. 95[APR.] (2019) 38-47.
-
- 20. C. Fundarò, A. Giardini, R. Maestri, S. Traversoni, M. Bartolo, and R. Casale, Plos. One. 13[2] (2018) 0191894.
-
- 21. D. Selva, B. Nagaraj, D. Pelusi, R. Arunkumar, and A. Nair, Algorithms 14[8] (2021) 224.
-
- 22. Z.D. Meng, C.J. Wang, Y.Q. Zhang, C. Luo, Z.Y. Wang, and W.C. Li, J. Biomater. Tissue Eng. 9[6] (2019) 783-788.
-
- 23. B. Koodziejska, A. Kaflak, and J. Kolmas, Materials 13[7] (2020) 1748.
-
 This Article
This Article
-
2022; 23(1): 48-52
Published on Feb 28, 2022
- 10.36410/jcpr.2022.23.1.48
- Received on Aug 6, 2021
- Revised on Sep 25, 2021
- Accepted on Oct 16, 2021
Services
- Abstract
introduction
motor rehabilitation and robotics
experimental analysis
conclusion
- References
- Full Text PDF
Shared
Correspondence to
- Shicheng Chen
-
Henan Institute of Economics and Trade, Henan Zhengzhou 450000
Tel : +0371-86661211 Fax: +0371-86661211 - E-mail: ShichengChen25@163.com
Clean-Energy Research Institute(CRI), Hanyang University, 222, Wangsimni-ro, Seongdong-gu, Seoul, 04763, Korea
E-mail: jcpr@hanyang.ac.kr